
Les véhicules à propulsion par vis sans fin ne sont plus une nouveauté. Le concept est apparu pour la première fois au 19ᵉ siècle grâce à Jacob Morath. Ce citoyen américain d’origine suisse avait développé en 1868, un engin agricole doté d’une bride hélicoïdale qui lui permettait d’avancer. Mais le principe qui régit ce mode de propulsion est celui de la vis d’Archimède qui aurait été imaginé par le grand scientifique grec Archimède de Syracuse lors d’un voyage en Égypte. S’appuyant sur la même technique, des chercheurs européens ont créé un véhicule robot qui pourrait révolutionner l’exploitation minière spatiale.
Un véhicule minier 2.0
L’équipe de recherche, dirigée par l’Université de technologie de Tallinn, en Estonie, a développé l’engin dans le but de permettre aux astronomes d’explorer le sol des mondes lointains tels que Mars et la Lune. En effet, grâce à sa propulsion hors du commun, l’appareil est censé être capable de rouler sans encombre sur différents types de terrain. Bien qu’il exploite une technique vieille de plusieurs siècles, l’engin nouvellement mis au point peut ainsi être considéré comme un véhicule minier autonome de nouvelle génération. En effet, contrairement aux rovers spatiaux actuels qui comportent des roues conventionnelles, le nouveau robot utilise à la place des vis d’Archimède.
Peut se déplacer facilement dans toutes les directions
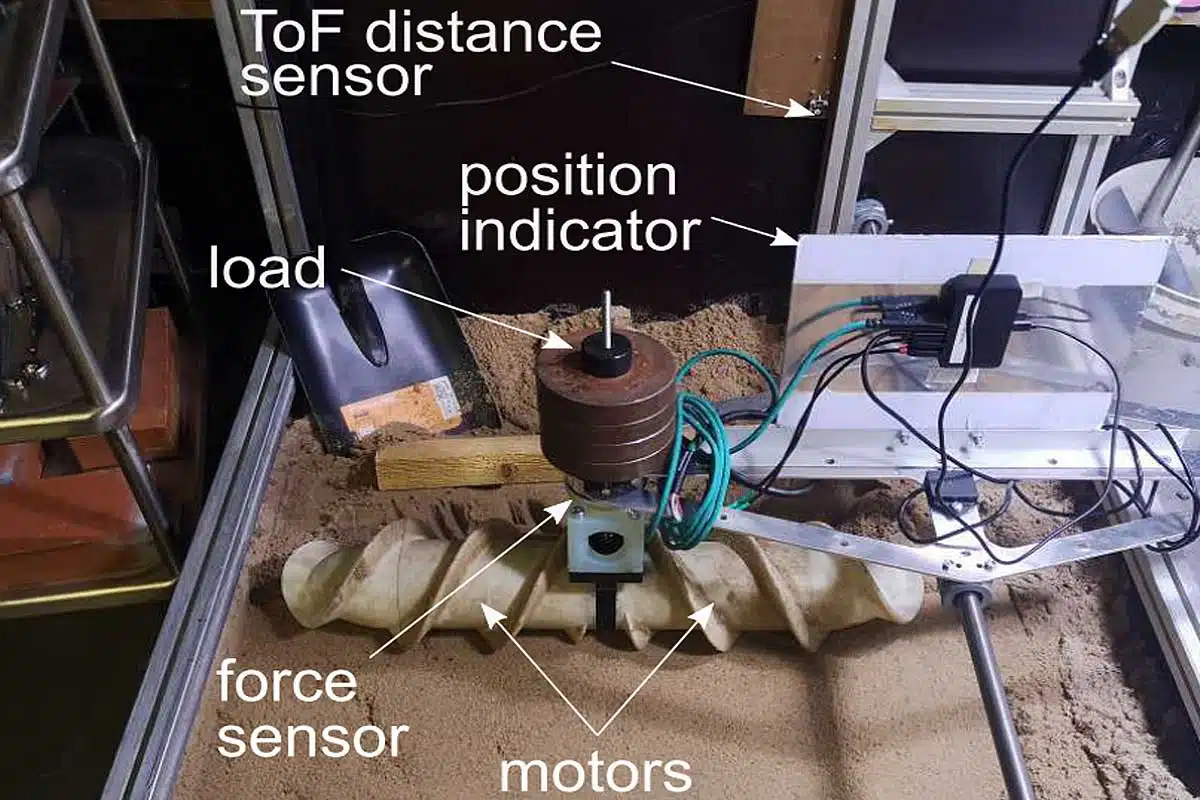
Les chercheurs ont prévu au total quatre vis sans fin pour la propulsion, chacune fonctionnant de manière isolée. Ce design est bénéfique dans la mesure où il permet au véhicule de se déplacer dans tous les sens. « Le système de locomotion du robot, composé de quatre actionneurs à vis d’Archimède contrôlés individuellement, permet un contrôle holonomique du mouvement planaire. Des tests sur divers terrains durs et à rendement ont démontré l’efficacité du système », souligne l’équipe dans une étude parue dans la revue IEEE Access. En effet, un prototype imprimé en 3D a été fabriqué à des fins de simulation et de test.
Des performances prometteuses
Pour garantir un fonctionnement sûr et intelligent, les universitaires ont doté le véhicule d’algorithmes de contrôle ultrasophistiqués. Celui-ci dispose aussi de capteurs qui lui permettent de contourner les obstacles et de mieux se repérer dans son environnement. C’est le cas par exemple du capteur temps de vol (ToF) qui est essentiel pour déterminer avec précision la distance par rapport aux objets.
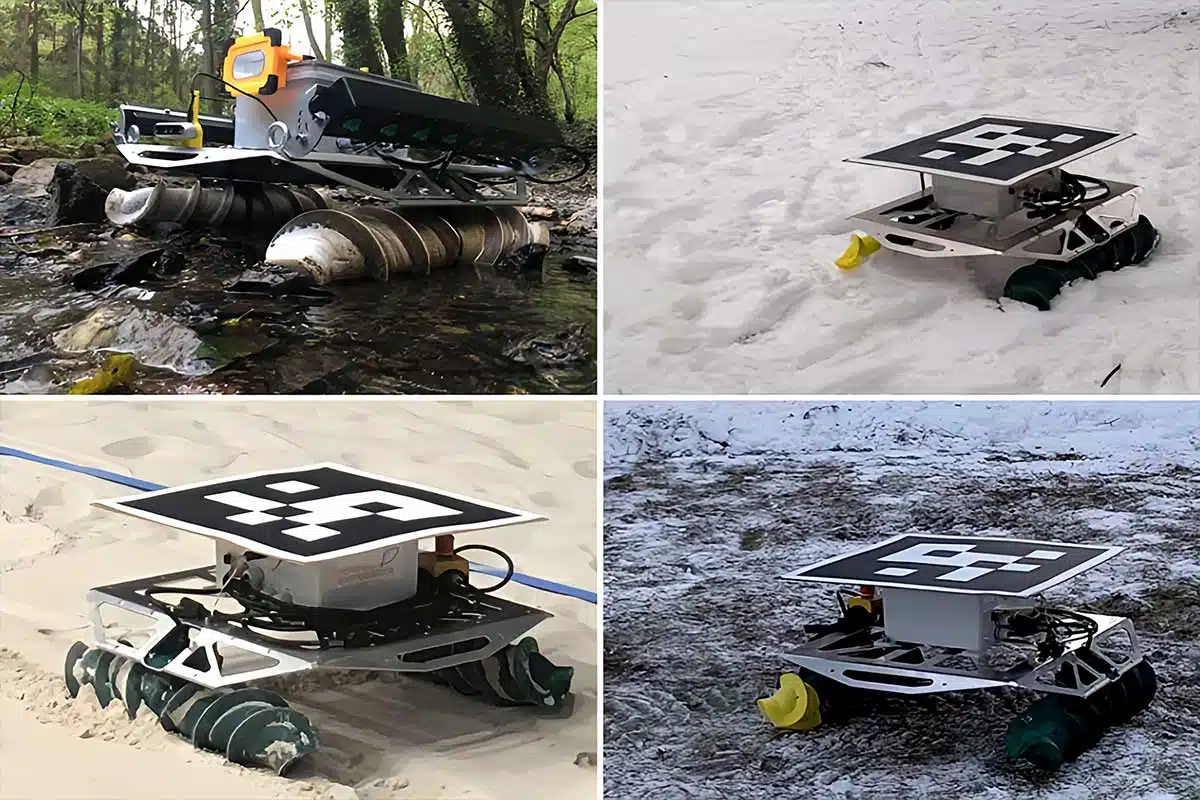
Lors des essais sur le terrain, le démonstrateur a fait preuve d’une grande agilité en démontrant son excellente capacité à traverser la neige, le sable, le sol gelé et la boue. À noter que ce véhicule autonome tout terrain a été créé dans le cadre du projet ROBOMINERS financé par l’Union européenne. Plus d’informations : ieeexplore.ieee.org. Connaissiez-vous un tel système de propulsion avec des vis d’Archimède ? Je vous invite à nous donner votre avis, vos remarques ou nous remonter une erreur dans le texte, cliquez ici pour publier un commentaire .

Cette innovation technologique est vraiment fascinante. Elle permet s’ouvrir de nouvelles perspectives pour le monde du domaine spatial. Optimiser la collecte des ressources extraterrestres permettrait de limiter notre dépendance aux ressources terrestres. Et au vu de nos ressources je pense que c’est vriament pas plus mal.
C’est une idée prometteuse oui mais qu’en est il de l’impact environnemental au niveau de l’exploitation minière extraterrestre ? Je pense malgre tout qu’une surexploitation pourrait également créer une certaine pollution ou un dérèglement dé l’écosystème extraterrestre que nous ne comprenons pas encore totalement…
Je pense que ce genre d’innovation est vraiment réservée aux grandes entreprises comme la NASA ou encore aux gouvernements mais pas plus. Et au vu de la technologie je pense que ce genre d’exploitation doit couter super chere. Puis il y aura encore plus d’inégalités économiques puisque seuls les pays riches pourront exploiter.