
Avez-vous vu cette vidéo impressionnante qui a circulé sur les réseaux sociaux récemment, démontrant un robot-cheval capable de bondir de rocher en rocher et de sprinter sur un terrain accidenté ? Rassurez-vous, ce sont des images de synthèses dévoilées par Kawasaki Heavy Industries pour présenter le CORLEO. Un concept de robot-moto-cheval qui semble tout droit sorti d’un film de science-fiction. Ce robot quadrupède biplace pilotable serait capable de se frayer un chemin sur des terrains accidentés grâce à la vision artificielle. La multinationale japonaise a dévoilé ce qui est peut-être le concept le plus extravagant jamais vu.
Le dernier concept-car de Kawasaki Heavy Industries
Dernier concept-car de Kawasaki Heavy Industries, le CORLEO a été dévoilé en avant-première à l’Osaka Kansai Expo 2025. KHI a présenté un prototype de robot à quatre pattes qui serait propulsé par des piles à hydrogène et capable de se tenir debout et de poser. Elle affirme qu’il s’agit d’une idée pour un projet de mobilité pour 2050, et souligne que le CORLEO est plus qu’un véhicule. Alliant design innovant, fonctionnalité et rapidité, ce monstre tout-terrain ouvre de nouvelles possibilités pour les transports futurs. La multinationale japonaise explique que son intelligence artificielle serait capable d’analyser minutieusement et de prédire les pas, mais aussi de choisir les options les plus sûres, tout en réagissant au langage corporel du pilote comme principal moyen de contrôle.

Équipé d’un moteur à hydrogène
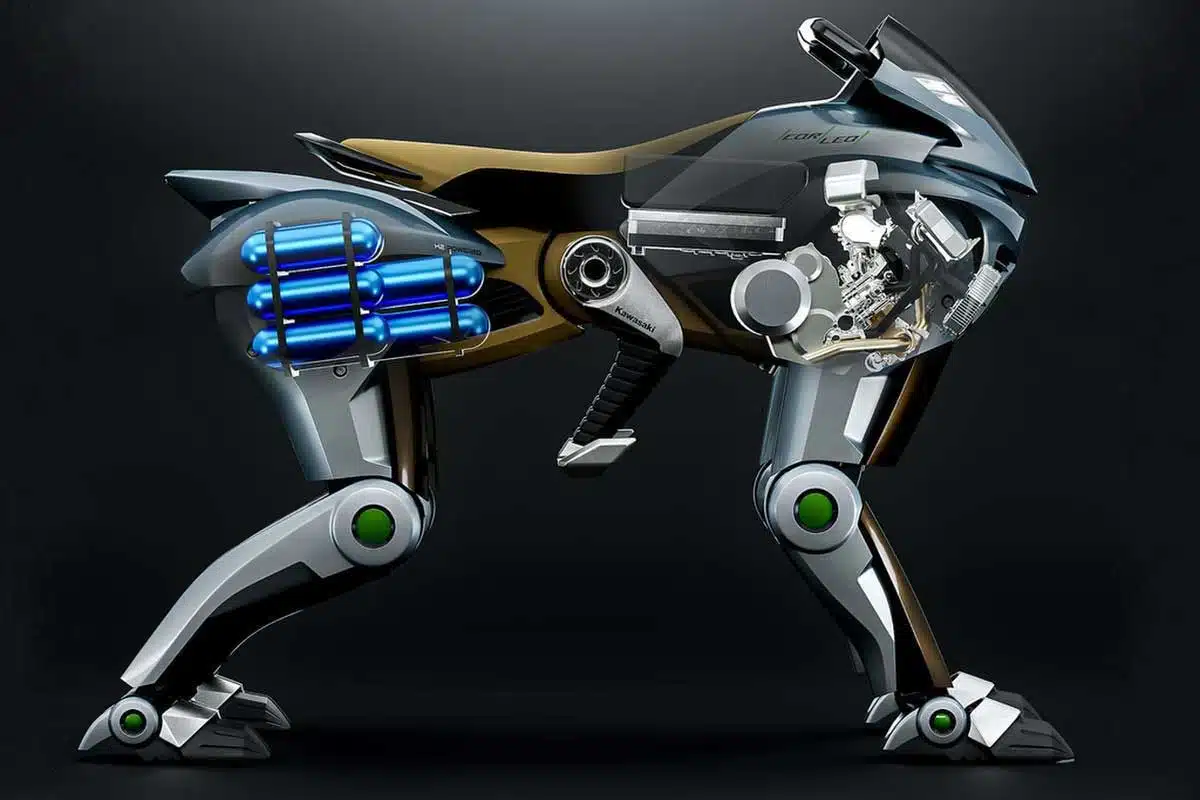
Le CORLEO est équipé d’un moteur à hydrogène de 150 cm³ pour la production d’énergie. Kawasaki Heavy Industries indique que l’électricité produite alimente les unités de transmission installées sur chacun des quatre pieds. Un tableau de bord affiche le niveau d’hydrogène qui, notons-le, est fourni par une bouteille montée à l’arrière du robot-cheval. La multinationale japonaise affirme également que d’autres informations y sont affichées, comme la position du centre de gravité, l’itinéraire, etc. La nuit, la conduite serait optimisée grâce à des marqueurs projetés sur la chaussée, afin d’indiquer au pilote le chemin à suivre. Et ce n’est pas tout, le pilote pourrait contrôler la machine grâce aux transferts de poids détectés par les pattes et le guidon, et maintenir une posture optimale en modifiant la longueur de l’étrier.
Un robot qui s’adapte à divers terrains
Avec les différentes caractéristiques présentées par KHI, ce robot-moto-cheval s’adapterait à divers terrains. Il semblerait que les pattes arrière du CORLEO soient dotées d’une articulation supplémentaire pour une meilleure résistance aux chocs et que ses sabots soient dotés de semelles en caoutchouc pour une bonne adhérence. Celles-ci seraient capables d’absorber les irrégularités du sol et de s’adapter à tous types de parcours, dont des zones rocheuses, des prairies et des terrains accidentés.
On dirait que tout a été pensé pour offrir à ce robot la maniabilité et la stabilité des motos Kawasaki. Pour le moment, nous ne savons pas si le prototype présenté à l’Osaka Kansai Expo 2025 bénéficie de ces caractéristiques et s’il est équipé du moteur hydrogène annoncé. Quoi qu’il en soit, le concept semble surréaliste. Attendons de voir la suite ! Plus d’informations : khi.co.jp. Êtes-vous prêts à aller gambader avec votre moto à quatre pattes ? Je vous invite à nous donner votre avis, vos remarques ou nous remonter une erreur dans le texte, cliquez ici pour publier un commentaire .
