Les humanoïdes actuels ne peuvent pas encore reproduire efficacement les mouvements d’un humain. Et pour cause, ils dépendent d’actionneurs rigides pour se déplacer et effectuer certains gestes. Inspirés par la démarche humaine, des scientifiques japonais ont créé un prototype à échelle réduite qui mêle biologie et mécanique. Concrètement, Shoji Takeuchi et ses collègues de l’université de Tokyo ont utilisé des tissus musculaires cultivés en laboratoire et des matériaux synthétiques pour mettre au point un robot bio-hybride bipède capable de marcher et de pivoter. Des capacités qui lui permettent d’éviter les obstacles. Un article qui décrit cette percée a été partagé dans la revue Matter.
Des pièces imprimées en 3D
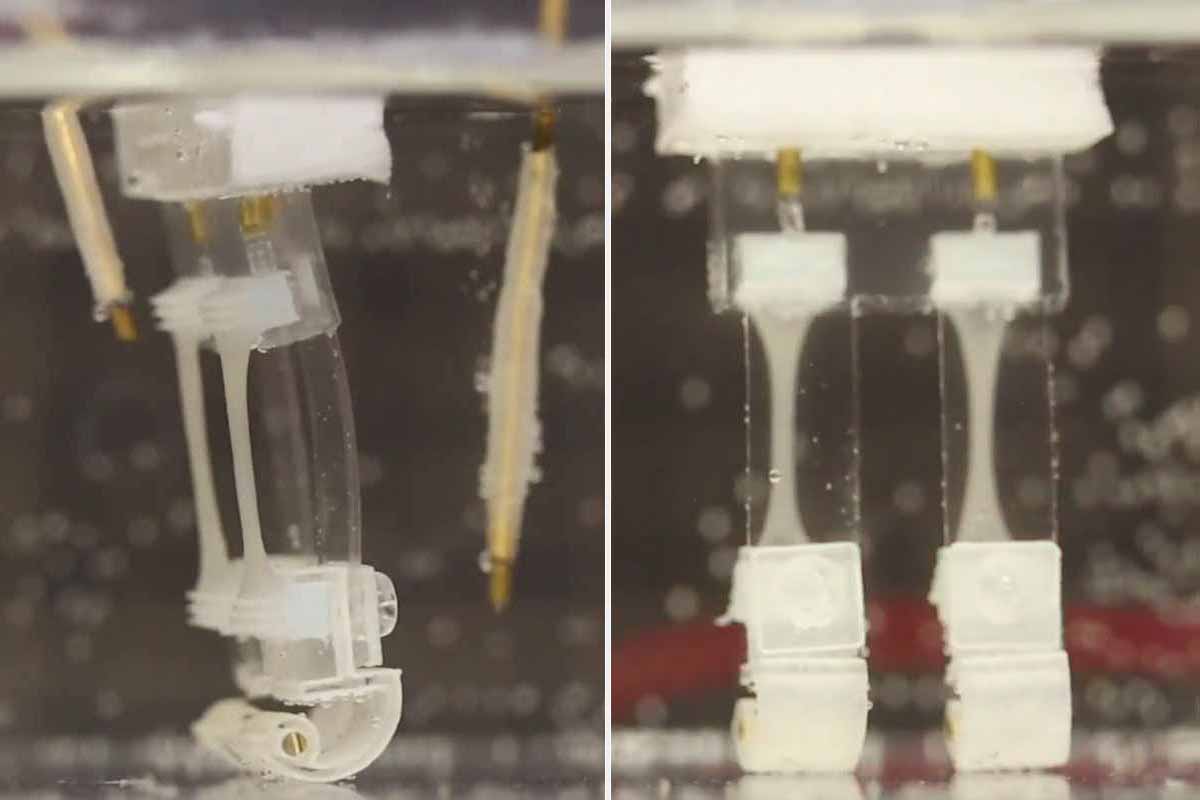
Pour construire ce robot innovant, les chercheurs de l’Université de Tokyo ont utilisé l’impression en 3D. Bien qu’elle soit capable d’effectuer des mouvements plus agiles et raffinés, la machine ne fonctionne pour l’instant que sous l’eau. Et pour cause, ses muscles sèchent à l’air libre. Face à cette contrainte, les scientifiques l’ont équipé d’un flotteur en mousse et d’un système de lestage au niveau de ses deux pattes pour le maintenir debout. Le squelette du robot est constitué de pièces en caoutchouc silicone qui est suffisamment flexible pour permettre aux muscles de se mettre en mouvement. Bien sûr, ils n’ont pas oublié d’intégrer les tissus musculaires vivants à leur emplacement prévu, c’est-à-dire au niveau des jambes.
培養筋組織で動く二足歩行ロボットをMatter誌で発表しました!3月16日まで閲覧可!
Biohybrid bipedal robot powered by skeletal muscle tissue
Matter: https://t.co/bsoWvsHNCQ
PR:https://t.co/22PB7qNvJk
a small step, a giant leap for biohybrid robots! #biohybrid #バイオハイブリッド pic.twitter.com/8H7c3bd6f2— 東京大学竹内昌治研究室 (@tlab_UTokyo) January 26, 2024
Du courant électrique pour stimuler les muscles
Grâce à une stimulation électrique, les muscles se sont mis à bouger lors d’un essai que l’équipe a filmé. Concrètement, lorsqu’un courant électrique est appliqué, ils se contractent, soulevant la jambe. À l’inverse, quand le circuit est coupé, la jambe fait un pas en avant. En alternant cette séquence toutes les cinq secondes, les chercheurs sont parvenus à faire marcher leur prototype de robot biohybride. Pour obtenir un mouvement de rotation (pivotement), ils appliquent une décharge électrique sur une jambe tandis que l’autre reste immobile. Pour l’heure, le robot marche très lentement, à une vitesse maximale d’environ 5,4 mm/min. Il a ainsi fallu plus d’une minute pour accomplir une rotation à 90 degrés.
Vers l’ajout d’une peau artificielle
Ces maigres performances sont principalement dues au fait que les scientifiques doivent déplacer les électrodes à la main pour contrôler les jambes. À l’avenir, ils envisagent alors d’automatiser ce processus afin de permettre au robot de se déplacer plus vite. Ils comptent même ajouter des articulations et des tissus musculaires plus épais recouverts d’une peau artificielle, ce qui devrait améliorer les capacités tout en rendant possible une utilisation hors de l’eau. « L’utilisation des muscles comme actionneurs nous permet de construire un robot compact et d’obtenir des mouvements efficaces et silencieux avec un contact doux », a déclaré Shoji Takeuchi. Plus d’infos : cell.com. Que pensez-vous de cette innovation ? N’hésitez pas à partager votre avis, vos remarques ou nous signaler une erreur dans le texte, cliquez ici pour publier un commentaire .